Euler equation
A linear ordinary differential equation of order  of the form
of the form
 | (1) |
where  ,
,  , are constants and
, are constants and  . This equation was studied in detail by L. Euler, starting from 1740.
. This equation was studied in detail by L. Euler, starting from 1740.
The change of the independent variable  transforms (1) for
transforms (1) for  to the linear equation of order
to the linear equation of order  with constant coefficients
with constant coefficients
 |
The characteristic equation of the latter is called the indicial equation of the Euler equation (1). The point  is a regular singular point of the homogeneous Euler equation. A fundamental system of (real) solutions of the real homogeneous equation (1) on the semi-axis
is a regular singular point of the homogeneous Euler equation. A fundamental system of (real) solutions of the real homogeneous equation (1) on the semi-axis  consists of functions of the form
consists of functions of the form
 | (2) |
If  , then (1) requires the substitution
, then (1) requires the substitution  , and in (2)
, and in (2)  is replaced by
is replaced by  .
.
A more general equation than (1) is the Lagrange equation
 |
where  ,
,  and
and  are constants and
are constants and  ,
,  , which can also be reduced to a linear equation with constant coefficients by means of the substitution
, which can also be reduced to a linear equation with constant coefficients by means of the substitution
 |
References
| [1] | E. Kamke, "Handbuch der gewöhnliche Differentialgleichungen" , Chelsea, reprint (1947) |
Comments
References
| [a1] | E.L. Ince, "Ordinary differential equations" , Dover, reprint (1956) |
The Euler equation is a necessary condition for an extremum in problems of variational calculus; it was obtained by L. Euler (1744). Later J.L. Lagrange (1759) derived it by a different method. For this reason it is sometimes called the Euler–Lagrange equation. The Euler equation is a necessary condition for the vanishing of the first variation of a functional.
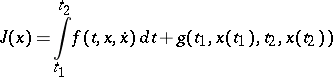
One of the problems of variational calculus consists in finding an extremum of the functional
 | (1) |
for prescribed conditions at the end points:
 | (2) |
If a continuously-differentiable function  ,
,  , is a solution of (1) and (2), then
, is a solution of (1) and (2), then  satisfies the Euler equation
satisfies the Euler equation
 | (3) |
or, in expanded form,
 | (4) |
A smooth solution of (3) or (4) is called an extremal. If  at a point
at a point  on an extremal, then at this point the extremal has a continuous second derivative
on an extremal, then at this point the extremal has a continuous second derivative  . An extremal such that
. An extremal such that  at all its points is called non-singular. For a non-singular extremal the Euler equation can be written in a form that is solvable with respect to the second derivative
at all its points is called non-singular. For a non-singular extremal the Euler equation can be written in a form that is solvable with respect to the second derivative  .
.
The solution of the variational problem (1), (2) need not be continuously differentiable. In general, the optimal solution  may be a piecewise-differentiable function. Then at the corner points of
may be a piecewise-differentiable function. Then at the corner points of  the Weierstrass–Erdmann corner conditions must be satisfied, which ensure the continuity of
the Weierstrass–Erdmann corner conditions must be satisfied, which ensure the continuity of  and
and  at the passage through a corner point, while on the segments between consecutive corner points the function
at the passage through a corner point, while on the segments between consecutive corner points the function  must satisfy the Euler equation. The piecewise-smooth curves consisting of pieces of extremals and satisfying the Weierstrass–Erdmann corner conditions are called polygonal (broken) extremals. In general, the differential Euler equation is an equation of the second order. Hence, its general solution depends on two arbitrary constants
must satisfy the Euler equation. The piecewise-smooth curves consisting of pieces of extremals and satisfying the Weierstrass–Erdmann corner conditions are called polygonal (broken) extremals. In general, the differential Euler equation is an equation of the second order. Hence, its general solution depends on two arbitrary constants  and
and  :
:
 |
These arbitrary constants can be determined from the boundary conditions (2):
 | (5) |
If the functional depends on several functions, that is,
 | (6) |
then one obtains a system of  Euler equations instead of one:
Euler equations instead of one:
 | (7) |
The general solution of (7) depends on 2n arbitrary constants, which are determined from given  boundary conditions (in a problem with fixed end points).
boundary conditions (in a problem with fixed end points).
In variational problems with variable end points, where the left-hand and right-hand end points of the extremal can move on given hypersurfaces, the missing boundary conditions, which make it possible to obtain a closed system of relations of the type (5), are determined by means of the necessary transversality condition.
For functionals containing higher-order derivatives (not just the first one, as in (1) and (6)), a necessary condition analogous to the Euler equation can be written in the form of the Euler–Poisson differential equation (see [1]).
For variational problems concerning the extremum of functionals that depend on functions of several variables, a necessary condition analogous to the Euler equation is written in the form of the Euler–Ostrogradski equation, which is a partial differential equation (see [2]).
In the case of variational problems for a conditional extremum the system of Euler equations is obtained by means of Lagrange multipliers. For example, for the Bolza problem, which requires one to find the extremum of a functional depending on  functions
functions  ,
,
 | (8) |
under differential constraints of the form
 | (9) |
and boundary conditions
 | (10) |
after using Lagrange multipliers  and
and  ,
,  , to construct from
, to construct from  and
and  the function
the function
 |
the Euler equations can be written in the from
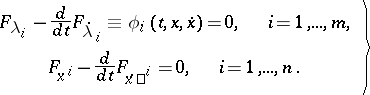 | (11) |
In this way, an optimal solution of the variational problem (8)–(10) must satisfy the system of  Euler differential equations (11) the first
Euler differential equations (11) the first  of which coincide with the given constraints (9). The additional use of the necessary transversality condition leads to a closed boundary value problem for determining the solution of (8)–(10).
of which coincide with the given constraints (9). The additional use of the necessary transversality condition leads to a closed boundary value problem for determining the solution of (8)–(10).
Besides the Euler equation and the transversality condition, the solution of a variational problem must also satisfy the remaining necessary conditions, that is, those of Clebsch (Legendre), Weierstrass and Jacobi.
References
| [1] | N.I. Akhiezer, "The calculus of variations" , Blaisdell (1962) (Translated from Russian) |
| [2] | M.A. Lavrent'ev, L.A. Lyusternik, "A course in variational calculus" , Moscow-Leningrad (1950) (In Russian) |
I.B. Vapnyarskii
Comments
References
| [a1] | W.H. Fleming, R.W. Rishel, "Deterministic and stochastic optimal control" , Springer (1975) |
| [a2] | I.M. Gel'fand, S.V. Fomin, "Calculus of variations" , Prentice-Hall (1963) (Translated from Russian) |
The Euler equation is a differential equation of the form
 |
where
 |
 |
L. Euler considered this equation in a number of papers, starting from 1753. He showed that its general solution has the form  , where
, where  is a symmetric polynomial of degree 4 in
is a symmetric polynomial of degree 4 in  and
and  .
.
BSE-3
Comments
In fluid mechanics, the system of equations of motion are also called the Euler equations.
For instance, for an inviscuous fluid the Euler equations of motion are
 |
where  is time,
is time,  is the density of the fluid,
is the density of the fluid,  is the pressure,
is the pressure,  is the
is the  -th component of the body force per unit mass, and
-th component of the body force per unit mass, and  is the velocity component in the direction of
is the velocity component in the direction of  ,
,  . Here
. Here  are Cartesian coordinates, and repeated indices in the equation above indicate summation.
are Cartesian coordinates, and repeated indices in the equation above indicate summation.
Finally, partial differential equations of the type
 | (a1) |
where  ,
,  are constants, are called Euler partial differential equations. Certain solutions can be expressed as integrals
are constants, are called Euler partial differential equations. Certain solutions can be expressed as integrals
 |
on Riemann surfaces given by  depending on two parameters
depending on two parameters  ,
,  . (Here
. (Here  is a polynomial in
is a polynomial in  .)
.)
There are connections between the monodromy of these solutions and automorphic functions on the  -dimensional unit ball. Cf. [a3] for a great deal of material on this topic. The Euler partial differential equation
-dimensional unit ball. Cf. [a3] for a great deal of material on this topic. The Euler partial differential equation
is also called Euler–Darboux–Poisson equation (cf. Mixed and boundary value problems for hyperbolic equations and systems) and Euler–Poisson–Darboux equation (cf. Differential equation, partial, with singular coefficients).
References
| [a1] | A.J. Chorin, J.E. Marsden, "A mathematical introduction to fluid dynamics" , Springer (1979) |
| [a2] | C.-S. Yih, "Stratified flows" , Acad. Press (1980) |
| [a3] | R.-P. Holzapfel, "Geometry and arithmetic around Euler partial differential equations" , Reidel (1986) |
Euler equation. Encyclopedia of Mathematics. URL: http://encyclopediaofmath.org/index.php?title=Euler_equation&oldid=13551