Rotation
A special kind of motion, for which at least one point in space remains at rest. If the rotation is in a plane, the fixed point is called the centre of the rotation; if the rotation is in space, the fixed straight line is called the axis of rotation. A rotation in a Euclidean space is called proper (a rotation of the first kind) or improper (a rotation of the second kind) depending on whether or not the orientation in space remains unchanged.
A proper rotation in a plane can be analytically expressed in Cartesian orthogonal coordinates  by the formulas
by the formulas
 |
where  is the rotation angle and the centre of the rotation is the coordinate origin. A proper rotation through an angle
is the rotation angle and the centre of the rotation is the coordinate origin. A proper rotation through an angle  may be represented as the product of two axial symmetries (reflections, cf. Reflection) with axes forming an angle of
may be represented as the product of two axial symmetries (reflections, cf. Reflection) with axes forming an angle of  with each other. An improper rotation in a plane can be analytically expressed in Cartesian orthogonal coordinates
with each other. An improper rotation in a plane can be analytically expressed in Cartesian orthogonal coordinates  by the formulas
by the formulas
 |
where  is the rotation angle and the centre of the rotation is the coordinate origin. An improper rotation in a plane may be represented as a product of a proper rotation by an axial symmetry.
is the rotation angle and the centre of the rotation is the coordinate origin. An improper rotation in a plane may be represented as a product of a proper rotation by an axial symmetry.
A rotation in an  -dimensional Euclidean space can be analytically expressed by an orthogonal matrix in canonical form:
-dimensional Euclidean space can be analytically expressed by an orthogonal matrix in canonical form:
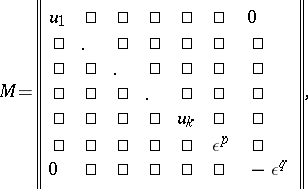 |
where
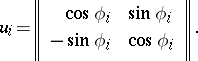 |
 is the identity matrix of order
is the identity matrix of order  (
( ). The following cases are possible:
). The following cases are possible:
1)  — the identity transformation;
— the identity transformation;
2)  — the rotation is a central symmetry;
— the rotation is a central symmetry;
3)  — the rotation is a symmetry with respect to a
— the rotation is a symmetry with respect to a  -plane (a reflection in a
-plane (a reflection in a  -plane);
-plane);
4)  does not contain submatrices
does not contain submatrices  and
and  — the rotation is called a rotation around a unique fixed point;
— the rotation is called a rotation around a unique fixed point;
5)  contains the submatrices
contains the submatrices  and
and  but does not contain the submatrix
but does not contain the submatrix  — the rotation is a rotation around a
— the rotation is a rotation around a  -plane;
-plane;
6)  contains the submatrices
contains the submatrices  and
and  but does not contain the submatrix
but does not contain the submatrix  — the rotation is called a rotational reflection in an
— the rotation is called a rotational reflection in an  -plane.
-plane.
The rotations of a Euclidean space around a given point form a group with respect to multiplication of rotations. This group is isomorphic to the group of orthogonal transformations (cf. Orthogonal transformation) of the vector space  or to the group of orthogonal matrices of order
or to the group of orthogonal matrices of order  over the field
over the field  . The rotation group of the space
. The rotation group of the space  is an
is an  -dimensional Lie group with an intransitive action on
-dimensional Lie group with an intransitive action on  .
.
References
| [1] | B.A. Rozenfel'd, "Multi-dimensional spaces" , Moscow (1966) (In Russian) |
| [2] | B.A. Rozenfel'd, "Non-Euclidean spaces" , Moscow (1969) (In Russian) |
| [3] | P.A. Shirokov, "Tensor calculus. Tensor algebra" , Kazan' (1961) (In Russian) |
Comments
References
| [a1] | M. Berger, "Geometry" , I , Springer (1987) |
| [a2] | H.S.M. Coxeter, "Introduction to geometry" , Wiley (1963) |
| [a3] | M. Greenberg, "Euclidean and non-Euclidean geometry" , Freeman (1980) pp. 105 |
| [a4] | B.A. [B.A. Rozenfel'd] Rosenfel'd, "A history of non-euclidean geometry" , Springer (1988) (Translated from Russian) |
| [a5] | B. Artmann, "Lineare Algebra" , Birkhäuser (1986) |
| [a6] | P.R. Halmos, "Finite-dimensional vector spaces" , v. Nostrand (1958) |
Rotation. Encyclopedia of Mathematics. URL: http://encyclopediaofmath.org/index.php?title=Rotation&oldid=48587