A term used in the theory of optimal control to describe an optimal method of controlling a system when a minimizing sequence of control functions does not have a limit in the class of Lebesgue-measurable functions.
For example, suppose a minimum of the functional
 | (1) |
has to be found, given the constraints
 | (2) |
 | (3) |
 | (4) |
In order to obtain a minimum of the functional (1), it is desirable for every  to have as small a value as possible of
to have as small a value as possible of  and as large a value as possible of
and as large a value as possible of  . The first requirement, with regard to the constraining condition (2), the boundary conditions (3) and the control constraint (4), is satisfied by the trajectory
. The first requirement, with regard to the constraining condition (2), the boundary conditions (3) and the control constraint (4), is satisfied by the trajectory
 | (5) |
If the trajectory (5) could be created for a control which, for all  , has the boundary values
, has the boundary values
 | (6) |
the absolute minimum of the functional (1) would be obtained. However, the "ideal" trajectory (5) cannot be created for any control function  which satisfies (6), since, when
which satisfies (6), since, when  ,
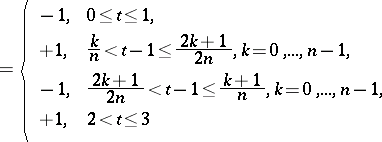
,  . Nevertheless, it is possible, using control functions
. Nevertheless, it is possible, using control functions  which, when
which, when  and
and  , realize ever more frequent switchings from 1 to
, realize ever more frequent switchings from 1 to  and vice versa:
and vice versa:
 | (7) |
( ), to create a minimizing sequence of controls
), to create a minimizing sequence of controls  which satisfies (6) and a minimizing sequence of trajectories
which satisfies (6) and a minimizing sequence of trajectories  converging towards the "ideal" trajectory (5).
converging towards the "ideal" trajectory (5).
Each trajectory  differs from (5) only on the interval
differs from (5) only on the interval  on which, instead of being a precise path along the
on which, instead of being a precise path along the  -axis, it makes a "saw-toothed" path with
-axis, it makes a "saw-toothed" path with  identical "teeth" , positioned above the
identical "teeth" , positioned above the  -axis. The "teeth of the saw" become ever finer when
-axis. The "teeth of the saw" become ever finer when  , such that
, such that  ,
,  . In this way, the minimizing sequence of trajectories
. In this way, the minimizing sequence of trajectories  converges towards (5), but the minimizing sequence of controls
converges towards (5), but the minimizing sequence of controls  , which, when
, which, when  and
and  , realizes ever more frequent switchings from 1 to
, realizes ever more frequent switchings from 1 to  and vice versa, does not have a limit in the class of measurable (and even more so in the class of piecewise continuous) functions. This means that on the section
and vice versa, does not have a limit in the class of measurable (and even more so in the class of piecewise continuous) functions. This means that on the section  an optimal sliding regime occurs.
an optimal sliding regime occurs.
Using heuristic reasoning, it is possible to describe the optimal sliding regime obtained in the following way: An optimal control at each point of the interval  "slides" , i.e. skips from the value
"slides" , i.e. skips from the value  to
to  and back, such that, for any interval of time, however small, the measure of the set of points
and back, such that, for any interval of time, however small, the measure of the set of points  in which
in which  is equal to the measure of the set of points
is equal to the measure of the set of points  in which
in which  , which, by virtue of equation (2), ensures a precise motion along the
, which, by virtue of equation (2), ensures a precise motion along the  -axis. The description given above of the character of change of an optimal control on part of a sliding regime is non-rigorous, for it does not satisfy the ordinary definition of a function.
-axis. The description given above of the character of change of an optimal control on part of a sliding regime is non-rigorous, for it does not satisfy the ordinary definition of a function.
It is possible to give a rigorous definition of an optimal sliding regime if, along with the initial problem (1)–(4), an auxiliary "split" problem is introduced: To find a minimum of the functional
 | (8) |
given the constraints
 | (9) |
 | (10) |
 | (11) |
The split problem (8)–(11) differs from the initial one in that, instead of one control function  , two independent control functions
, two independent control functions  and
and  are introduced; the integrand and the function on the right-hand side of equation (2) of the initial problem are replaced by a linear convex combination of corresponding functions, taken with different controls
are introduced; the integrand and the function on the right-hand side of equation (2) of the initial problem are replaced by a linear convex combination of corresponding functions, taken with different controls  and
and  and with coefficients
and with coefficients  ,
,  , which are also considered as control functions.
, which are also considered as control functions.
Thus, in problem (8)–(11) there are four controls  ,
,  ,
,  ,
,  . Insofar as
. Insofar as  and
and  are related by the equality-type condition
are related by the equality-type condition  , it is possible to drop one of the controls
, it is possible to drop one of the controls  or
or  by expressing it through the other. However, for the convenience of subsequent analysis, it is advisable to leave both controls in an explicit form.
by expressing it through the other. However, for the convenience of subsequent analysis, it is advisable to leave both controls in an explicit form.
Unlike the initial problem, an optimal control for the split problem (8)–(11) exists. On a section of the optimal sliding regime of the initial problem, the optimal control for the split problem takes the form
while on the sections of entry and exit:
On the section of an optimal sliding regime, the controls  and
and  , going linearly into the right-hand side, and the integrand accept values within the admissible domain. This means that the optimal sliding regime of the initial problem (1)–(4) is an optimal singular regime, or optimal singular control, for the auxiliary split problem (8)–(11).
, going linearly into the right-hand side, and the integrand accept values within the admissible domain. This means that the optimal sliding regime of the initial problem (1)–(4) is an optimal singular regime, or optimal singular control, for the auxiliary split problem (8)–(11).
The same results occur for optimal sliding regimes in general problems of optimal control. Suppose that a minimum of the functional
 | (12) |
has to be found, given the conditions
 | (13) |
 | (14) |
 | (15) |
The optimal sliding regime is characterized by the non-uniqueness of the maximum with respect to  of the Hamilton function
of the Hamilton function
where  are conjugate variables (see [2]). Under these conditions, on the section
are conjugate variables (see [2]). Under these conditions, on the section  of the
of the  -st "slide"
-st "slide"  with the maxima
with the maxima  , the initial problem splits and takes the form
, the initial problem splits and takes the form
 | (16) |
 | (17) |
 | (18) |
 | (19) |
The Hamilton function for the problem (16)–(19),
after excluding  and regrouping the terms, can be reduced to the form
and regrouping the terms, can be reduced to the form
 | (20) |
 |
 |
Because the  ,
,  , are equal to the maxima of
, are equal to the maxima of  with respect to
with respect to  on the set
on the set  , on the section
, on the section  of the optimal sliding regime with
of the optimal sliding regime with  maxima the coefficients at the
maxima the coefficients at the  independent linear controls
independent linear controls  of the Hamilton function of the split problem (12)–(15) are equal to zero. An optimal sliding regime with a "slide" through
of the Hamilton function of the split problem (12)–(15) are equal to zero. An optimal sliding regime with a "slide" through  maxima is an optimal singular regime with
maxima is an optimal singular regime with  components for the split problem (16)–(19). The maximum possible value of
components for the split problem (16)–(19). The maximum possible value of  advisable to take when researching sliding regimes is defined by the condition of convexity of the set of values of the right-hand side vector and the convexity from below of the greatest lower bound of the set of values of the integrand of the split system obtained when the control vector
advisable to take when researching sliding regimes is defined by the condition of convexity of the set of values of the right-hand side vector and the convexity from below of the greatest lower bound of the set of values of the integrand of the split system obtained when the control vector  ,
,  , runs through the whole admissible domain of values. Thus,
, runs through the whole admissible domain of values. Thus,  is an estimation from above for
is an estimation from above for  . In the most general case, all optimal sliding regimes of the initial problem can be obtained as optimal singular controls of the split problem written out for
. In the most general case, all optimal sliding regimes of the initial problem can be obtained as optimal singular controls of the split problem written out for  . In particular, in the above example, the split problem has been examined when
. In particular, in the above example, the split problem has been examined when  , insofar as the constraints contain only one equation; investigation into the split problem (8)–(11) has proved adequate for research into the optimal sliding regime of the initial problem (1)–(4).
, insofar as the constraints contain only one equation; investigation into the split problem (8)–(11) has proved adequate for research into the optimal sliding regime of the initial problem (1)–(4).
If  and controls
and controls  are known which provide equal absolute maxima of the Hamilton function
are known which provide equal absolute maxima of the Hamilton function  in the admissible domain
in the admissible domain  , then the analysis of the optimal sliding regime reduces to the investigation of an optimal singular regime with
, then the analysis of the optimal sliding regime reduces to the investigation of an optimal singular regime with  components. This investigation can be carried out by using necessary conditions of optimality of a singular control (see Optimal singular regime).
components. This investigation can be carried out by using necessary conditions of optimality of a singular control (see Optimal singular regime).
Investigations have been carried out into optimal sliding regimes using sufficient conditions of optimality (see [4]).
References
| [1] | R.V. Gamkrelidze, "Optimal sliding states" Soviet Math. Dokl. , 3 : 2 (1962) pp. 559–562 Dokl. Akad. Nauk SSSR , 143 : 6 (1962) pp. 1243–1245 |
| [2] | L.S. Pontryagin, V.G. Boltayanskii, R.V. Gamkrelidze, E.F. Mishchenko, "The mathematical theory of optimal processes" , Wiley (1967) (Translated from Russian) |
| [3] | I.B. Vapnyarskii, "An existence theorem for optimal control in the Boltz problem, some of its applications and the necessary conditions for the optimality of moving and singular systems" USSR Comp. Math. Math. Phys. , 7 : 2 (1963) pp. 22–54 Zh. Vychisl. Mat. i Mat. Fiz. , 7 : 2 (1967) pp. 259–283 |
| [4] | V.F. Krotov, "Methods for solving variational problems based on sufficient conditions for an absolute minimum II" Automat. Remote Control , 24 (1963) pp. 539–553 Avtomatik. i Telemekh. , 24 : 5 (1963) pp. 581–598 |
A sliding control is also called a chattering control, see [a1].
For more references see also Optimal singular regime.
References
| [a1] | L. Markus, "Foundations of optimal control theory" , Wiley (1967) |