Difference between revisions of "Rotation method"
Ulf Rehmann (talk | contribs) m (tex encoded by computer) |
Ulf Rehmann (talk | contribs) m (Undo revision 48589 by Ulf Rehmann (talk)) Tag: Undo |
||
| Line 1: | Line 1: | ||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
''Jacobi method'' | ''Jacobi method'' | ||
| Line 17: | Line 5: | ||
The ideas underlying the method were presented in [[#References|[1]]]. In its modern form it is one of the most advanced and effective methods implemented on a computer for solving the complete problem of eigenvalues of a matrix. | The ideas underlying the method were presented in [[#References|[1]]]. In its modern form it is one of the most advanced and effective methods implemented on a computer for solving the complete problem of eigenvalues of a matrix. | ||
| − | The classical rotation method involves the construction of a sequence of matrices | + | The classical rotation method involves the construction of a sequence of matrices <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826401.png" /> where <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826402.png" /> is the initial matrix, <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826403.png" />, and <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826404.png" /> is the matrix of the planar rotation which annihilates the off-diagonal entry of maximum modulus of the matrix <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826405.png" />. Here, if <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826406.png" />, <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826407.png" />, the matrix <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826408.png" /> differs from the identity matrix only by the entries <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r0826409.png" />, <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264010.png" />, <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264011.png" />, <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264012.png" />. In the real case, when <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264013.png" /> is a [[Symmetric matrix|symmetric matrix]], |
| − | where | ||
| − | is the initial matrix, | ||
| − | and | ||
| − | is the matrix of the planar rotation which annihilates the off-diagonal entry of maximum modulus of the matrix | ||
| − | Here, if | ||
| − | |||
| − | the matrix | ||
| − | differs from the identity matrix only by the entries | ||
| − | |||
| − | |||
| − | |||
| − | In the real case, when | ||
| − | is a [[Symmetric matrix|symmetric matrix]], | ||
| − | + | <table class="eq" style="width:100%;"> <tr><td valign="top" style="width:94%;text-align:center;"><img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264014.png" /></td> <td valign="top" style="width:5%;text-align:right;">(*)</td></tr></table> | |
| − | |||
In the complex case the relations (*) become insignificantly more complicated. | In the complex case the relations (*) become insignificantly more complicated. | ||
| − | The sequence of matrices | + | The sequence of matrices <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264015.png" /> converges to a diagonal matrix <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264016.png" />, the rate of the convergence being asymptotically quadratic. The diagonal entries of <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264017.png" /> are approximate eigenvalues of <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264018.png" />, while the columns of the matrix <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264019.png" /> are approximate eigenvectors. |
| − | converges to a diagonal matrix | ||
| − | the rate of the convergence being asymptotically quadratic. The diagonal entries of | ||
| − | are approximate eigenvalues of | ||
| − | while the columns of the matrix | ||
| − | are approximate eigenvectors. | ||
The realization of this variant of the rotation method involves the choice of the off-diagonal matrix entry of maximum modulus at each step. The realization of this operation on a computer requires considerable computational labour. | The realization of this variant of the rotation method involves the choice of the off-diagonal matrix entry of maximum modulus at each step. The realization of this operation on a computer requires considerable computational labour. | ||
| Line 48: | Line 17: | ||
There exist other variants of the rotation method, which are more effective in this respect: the cyclic rotation method, the rotation method with a barrier, and the rotation method with selection of an optimal element. | There exist other variants of the rotation method, which are more effective in this respect: the cyclic rotation method, the rotation method with a barrier, and the rotation method with selection of an optimal element. | ||
| − | In the cyclic rotation method the pairs of indices | + | In the cyclic rotation method the pairs of indices <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264020.png" /> of the entry that has to be annihilated cyclically run through all the upper-diagonal locations. The drawback of this method is that it may be necessary to carry out a large number of ineffective rotations that annihilate small off-diagonal entries. |
| − | of the entry that has to be annihilated cyclically run through all the upper-diagonal locations. The drawback of this method is that it may be necessary to carry out a large number of ineffective rotations that annihilate small off-diagonal entries. | ||
| − | This disadvantage is partly eliminated in the rotation method with a barrier, which involves the introduction of a sequence of numbers | + | This disadvantage is partly eliminated in the rotation method with a barrier, which involves the introduction of a sequence of numbers <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264021.png" /> called barriers, which monotonically decreases towards zero. During the cyclic review of indices <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264022.png" /> only those off-diagonal entries with modulus larger than <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264023.png" /> are annihilated. In the following stage, after all the off-diagonal entries have become smaller than <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264024.png" />, the barrier <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264025.png" /> is replaced by the barrier <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264026.png" /> and the process is continued. Application of this variant of the rotation method in practical work involves several difficulties, concerning the choice of an optimal barrier. |
| − | called barriers, which monotonically decreases towards zero. During the cyclic review of indices | ||
| − | only those off-diagonal entries with modulus larger than | ||
| − | are annihilated. In the following stage, after all the off-diagonal entries have become smaller than | ||
| − | the barrier | ||
| − | is replaced by the barrier | ||
| − | and the process is continued. Application of this variant of the rotation method in practical work involves several difficulties, concerning the choice of an optimal barrier. | ||
| − | The method which is best suited for use in computational practice is the rotation method with selection of an optimal element [[#References|[4]]]. In this method the pairs of indices | + | The method which is best suited for use in computational practice is the rotation method with selection of an optimal element [[#References|[4]]]. In this method the pairs of indices <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264027.png" /> correspond to the almost-maximal entry and are so chosen that <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264028.png" /> is the number of a row with maximal Euclidean length, and <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264029.png" /> is the number of a column of an off-diagonal entry of maximum modulus in the <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264030.png" />-th row. Since the rows of the matrix, except for the <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264031.png" />-th and <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264032.png" />-th row, do not vary in length at any stage of the process, the choice of the indices <img align="absmiddle" border="0" src="https://www.encyclopediaofmath.org/legacyimages/r/r082/r082640/r08264033.png" /> does not significantly increase the computational labour involved. The entire theory of the classical rotation method is fully applicable to this modification [[#References|[2]]]. |
| − | correspond to the almost-maximal entry and are so chosen that | ||
| − | is the number of a row with maximal Euclidean length, and | ||
| − | is the number of a column of an off-diagonal entry of maximum modulus in the | ||
| − | th row. Since the rows of the matrix, except for the | ||
| − | th and | ||
| − | th row, do not vary in length at any stage of the process, the choice of the indices | ||
| − | does not significantly increase the computational labour involved. The entire theory of the classical rotation method is fully applicable to this modification [[#References|[2]]]. | ||
The difference formulas of the rotation method which are used to calculate (*) ensure the convergence of the process of the rotation method under practical conditions of computer arithmetic, and also ensure highly accurate values of both eigenvalues and eigenvectors [[#References|[5]]]. | The difference formulas of the rotation method which are used to calculate (*) ensure the convergence of the process of the rotation method under practical conditions of computer arithmetic, and also ensure highly accurate values of both eigenvalues and eigenvectors [[#References|[5]]]. | ||
| Line 72: | Line 27: | ||
====References==== | ====References==== | ||
<table><TR><TD valign="top">[1]</TD> <TD valign="top"> C.G.J. Jacobi, "Ueber ein leichtes Verfahren, die in der Theorie der Säcularstörungen vorkommenden Gleichungen numerisch auflösen" ''J. Reine Angew. Math.'' , '''30''' (1846) pp. 51–94</TD></TR><TR><TD valign="top">[2]</TD> <TD valign="top"> V.V. Voevodin, "Numerical methods of algebra" , Moscow (1966) (In Russian)</TD></TR><TR><TD valign="top">[3]</TD> <TD valign="top"> J.H. Wilkinson, "The algebraic eigenvalue problem" , Oxford Univ. Press (1969)</TD></TR><TR><TD valign="top">[4]</TD> <TD valign="top"> V.V. Voevodin, G.D. Kim, "A program for finding eigen...." ''Vychisl. Met. i Programmirovanie'' , Moscow (1962) pp. 269–277</TD></TR><TR><TD valign="top">[5]</TD> <TD valign="top"> G.D. Kim, , ''Numerical analysis in Fortan'' , '''3''' , Moscow (1973) pp. 97–113 (In Russian)</TD></TR></table> | <table><TR><TD valign="top">[1]</TD> <TD valign="top"> C.G.J. Jacobi, "Ueber ein leichtes Verfahren, die in der Theorie der Säcularstörungen vorkommenden Gleichungen numerisch auflösen" ''J. Reine Angew. Math.'' , '''30''' (1846) pp. 51–94</TD></TR><TR><TD valign="top">[2]</TD> <TD valign="top"> V.V. Voevodin, "Numerical methods of algebra" , Moscow (1966) (In Russian)</TD></TR><TR><TD valign="top">[3]</TD> <TD valign="top"> J.H. Wilkinson, "The algebraic eigenvalue problem" , Oxford Univ. Press (1969)</TD></TR><TR><TD valign="top">[4]</TD> <TD valign="top"> V.V. Voevodin, G.D. Kim, "A program for finding eigen...." ''Vychisl. Met. i Programmirovanie'' , Moscow (1962) pp. 269–277</TD></TR><TR><TD valign="top">[5]</TD> <TD valign="top"> G.D. Kim, , ''Numerical analysis in Fortan'' , '''3''' , Moscow (1973) pp. 97–113 (In Russian)</TD></TR></table> | ||
| + | |||
| + | |||
====Comments==== | ====Comments==== | ||
Revision as of 14:53, 7 June 2020
Jacobi method
A method for the solution of the complete problem of eigenvalues for a Hermitian matrix, based on a similarity transformation of the Hermitian matrix to diagonal form using a sequence of planar rotations. The rotation method is an iterative method; it has a simple computational scheme and is always convergent, the rate of convergence being asymptotically quadratic. The presence of multiple or close eigenvalues in the matrix presents no difficulties. The method makes it possible to compute eigenvalues both by finding the eigenvectors and without them. The system of eigenvectors computed by the rotation method is orthonormal.
The ideas underlying the method were presented in [1]. In its modern form it is one of the most advanced and effective methods implemented on a computer for solving the complete problem of eigenvalues of a matrix.
The classical rotation method involves the construction of a sequence of matrices  where
where  is the initial matrix,
is the initial matrix,  , and
, and  is the matrix of the planar rotation which annihilates the off-diagonal entry of maximum modulus of the matrix
is the matrix of the planar rotation which annihilates the off-diagonal entry of maximum modulus of the matrix  . Here, if
. Here, if  ,
,  , the matrix
, the matrix  differs from the identity matrix only by the entries
differs from the identity matrix only by the entries  ,
,  ,
,  ,
,  . In the real case, when
. In the real case, when  is a symmetric matrix,
is a symmetric matrix,
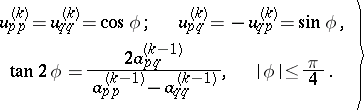 | (*) |
In the complex case the relations (*) become insignificantly more complicated.
The sequence of matrices  converges to a diagonal matrix
converges to a diagonal matrix  , the rate of the convergence being asymptotically quadratic. The diagonal entries of
, the rate of the convergence being asymptotically quadratic. The diagonal entries of  are approximate eigenvalues of
are approximate eigenvalues of  , while the columns of the matrix
, while the columns of the matrix  are approximate eigenvectors.
are approximate eigenvectors.
The realization of this variant of the rotation method involves the choice of the off-diagonal matrix entry of maximum modulus at each step. The realization of this operation on a computer requires considerable computational labour.
There exist other variants of the rotation method, which are more effective in this respect: the cyclic rotation method, the rotation method with a barrier, and the rotation method with selection of an optimal element.
In the cyclic rotation method the pairs of indices  of the entry that has to be annihilated cyclically run through all the upper-diagonal locations. The drawback of this method is that it may be necessary to carry out a large number of ineffective rotations that annihilate small off-diagonal entries.
of the entry that has to be annihilated cyclically run through all the upper-diagonal locations. The drawback of this method is that it may be necessary to carry out a large number of ineffective rotations that annihilate small off-diagonal entries.
This disadvantage is partly eliminated in the rotation method with a barrier, which involves the introduction of a sequence of numbers  called barriers, which monotonically decreases towards zero. During the cyclic review of indices
called barriers, which monotonically decreases towards zero. During the cyclic review of indices  only those off-diagonal entries with modulus larger than
only those off-diagonal entries with modulus larger than  are annihilated. In the following stage, after all the off-diagonal entries have become smaller than
are annihilated. In the following stage, after all the off-diagonal entries have become smaller than  , the barrier
, the barrier  is replaced by the barrier
is replaced by the barrier  and the process is continued. Application of this variant of the rotation method in practical work involves several difficulties, concerning the choice of an optimal barrier.
and the process is continued. Application of this variant of the rotation method in practical work involves several difficulties, concerning the choice of an optimal barrier.
The method which is best suited for use in computational practice is the rotation method with selection of an optimal element [4]. In this method the pairs of indices  correspond to the almost-maximal entry and are so chosen that
correspond to the almost-maximal entry and are so chosen that  is the number of a row with maximal Euclidean length, and
is the number of a row with maximal Euclidean length, and  is the number of a column of an off-diagonal entry of maximum modulus in the
is the number of a column of an off-diagonal entry of maximum modulus in the  -th row. Since the rows of the matrix, except for the
-th row. Since the rows of the matrix, except for the  -th and
-th and  -th row, do not vary in length at any stage of the process, the choice of the indices
-th row, do not vary in length at any stage of the process, the choice of the indices  does not significantly increase the computational labour involved. The entire theory of the classical rotation method is fully applicable to this modification [2].
does not significantly increase the computational labour involved. The entire theory of the classical rotation method is fully applicable to this modification [2].
The difference formulas of the rotation method which are used to calculate (*) ensure the convergence of the process of the rotation method under practical conditions of computer arithmetic, and also ensure highly accurate values of both eigenvalues and eigenvectors [5].
References
| [1] | C.G.J. Jacobi, "Ueber ein leichtes Verfahren, die in der Theorie der Säcularstörungen vorkommenden Gleichungen numerisch auflösen" J. Reine Angew. Math. , 30 (1846) pp. 51–94 |
| [2] | V.V. Voevodin, "Numerical methods of algebra" , Moscow (1966) (In Russian) |
| [3] | J.H. Wilkinson, "The algebraic eigenvalue problem" , Oxford Univ. Press (1969) |
| [4] | V.V. Voevodin, G.D. Kim, "A program for finding eigen...." Vychisl. Met. i Programmirovanie , Moscow (1962) pp. 269–277 |
| [5] | G.D. Kim, , Numerical analysis in Fortan , 3 , Moscow (1973) pp. 97–113 (In Russian) |
Comments
It is an overstatement to call this Jacobi method to be one of the most effective methods available today. Indeed, for a Hermitian matrix the so-called QR method (see [a1] and Jacobi method) has cubic convergence, whereas the cyclic version of the Jacobi method, e.g., has quadratic convergence only.
References
| [a1] | G.H. Golub, C.F. van Loan, "Matrix computations" , Johns Hopkins Univ. Press (1989) |
Rotation method. Encyclopedia of Mathematics. URL: http://encyclopediaofmath.org/index.php?title=Rotation_method&oldid=49411